https://es-la.facebook.com/
https://twitter.com/?lang=es
https://www.youtube.com/
martes, 29 de septiembre de 2015


La robotica cuantica
La robótica cuántica avanza. Los científicos intentan desarrollar instrucciones lógicas suficientemente flexibles para que los ordenadores sean capaces de aprender por si mismos y de esta manera prever con mayor precisión. El 'cuando tu vas yo vengo' será posiblemente el patrón de 'pensamiento' cibernético más usual en el futuro de las relaciones con los humanos, los pilares del próximorobot humanoide se están construyendo. A imagen y semejanza del ser humano.
Investigadores de la Universidad Complutense de Madrid(UCM) y la Universidad de Innsbruck (Austria) publican un trabajo en la revista 'Physical Review X' donde auguran que la computación cuántica abre nuevos desarrollos en el campo de la robótica y en aquellos relacionados con la Inteligencia Artificial(IA). Por primera vez estos científicos han demostrado que las máquinas cuánticas se adaptan a situaciones donde las clásicas no terminan los procesos de aprendizaje y respuesta. Estos investigadores afirman que las máquinas cuánticas pueden responder de forma óptima y más rápida a la hora de actuar frente al entorno que las rodea, publica Sinc.

El mercado de la robotica y las perspectivas del futuro

La robotica de ciencia ficsión
Durante siglos nos ha fascinado la idea de crear seres mecanizados que casi podrían confundirse con uno de nosotros. Y a medida que nuestro conocimiento tecnológico avanza, nos acercamos cada vez más a lograrlo.
Desde los robots que puedes comprar ahora hasta los que invaden la fuerza laboral y la militar, nuestros amigos automatizados ya no son solo parte de las películas de ciencia ficción.
Pero como muchos avances científicos, la fantasía fue uno de los principales motivadores.
“La investigación científica y la ciencia ficción comienzan con las mismas palabras: ‘¿Qué pasaría si...?’”, dice el profesor de Física James Kakalios, titular del curso Todo lo que sabemos sobre la ciencia lo aprendimos de un comic, de la Universidad de Minnesota, en Estados Unidos.
Así que vale la pena echar un vistazo a los robots más influyentes de la cultura pop que ayudaron a inspirarnos en el camino.
El robot de Leonardo
El famoso pintor, escultor, inventor, ingeniero y genio versátil, Leonardo da Vinci, bosquejó su idea de un “caballero mecánico”. El resultado fue una especie de armadura automatizada por un sistema de poleas y palancas, que se cree fue exhibido en una fiesta en la corte de Milán, Italia, en 1495.
Podía ponerse de pie, sentarse, mover el brazo y levantar su visor.
Cuando las notas del trabajo de Da Vinci fueron descubiertas en la década de 1950, los investigadores recrearon el “robot”, lo que sugiere que su idea en realidad habría funcionado.
El autómata probablemente era impulsado por humanos, lo que significa que técnicamente no es un robot. Pero Leonardo trabajó posterioremente en construcciones programables, como un león automatizado, lo que sugiere que definitivamente tramaba algo.
Los primeros ‘robots’
R.U.R. (siglas en inglés de “Robots Universales de Rossum”) es una obra de teatro checa que se estrenó en 1921.
Se cree que fue la primera vez que el término “robots” se utilizó para describir a personas artificiales, las cuales, en el relato, son fabricadas con material sintético.
En checo, robota significa trabajo forzado.
Como ocurre en estos casos, los entres parecidos a cyborgs de la obra parecen estar perfectamente felices de servir a los humanos, hasta que una revuelta termina en la extinción de la raza humana. (No siempre se gana.)
La obra fue un gran éxito y, para 1923, estaba traducida en 30 idiomas.
María, la Maschinenmensch
El primer robot de película no se quedó atrás.
En 1927, Metropolis, de Fritz Lang, retrataba una imagen de un futuro distópico que sería retratado de nuevo décadas después en películas como Blade Runner.
En este, los industriales ricos crean a un robot mujer para hacerse pasar por María, una mujer que temen que organice a los trabajadores a quienes oprimen.
Varias celebridades, desde Queen hasta Nine Inch Nails y Madonna, tienen videos musicales inspirados en Metropolis o con clips de esta película. Medio siglo después de Metropolis, el androide C-3PO, de Star Wars, estuvo altamente inspirado en el robot María.
Las tres leyes de Asimov
El relato corto del que vienen, Runaround, fue escrito en 1942, pero se dio a conocer para las masas cuando la historia apareció en la colección de 1950 del escritor de ciencia ficción, Isaac Asimov: Yo, robot.
Antes de Asimov, la mayoría de las historias de robots seguían un patrón similar: primero los científicos crean a los robots y luego los robots se vuelven locos y atacan a sus creadores.
Aburrido de esta narrativa, Asimov estableció nuevas reglas en el camino de la robótica. Sus famosas 'Tres Leyes' son:
• Un robot no puede lastimar a un ser humano, o a través de la inacción, permitir que un ser humano resulte lastimado.
• Un robot debe obedecer las órdenes que le dan los seres humanos, excepto cuando esas órdenes entren en conflicto con la Primera Ley.
• Un robot debe proteger su propia existencia, siempre y cuando esa protección no entre en conflicto con la Primera o la Segunda Ley.
Pero eso no erradicó del todo los problemas. Muchas de las historias de Asimov, y las historias y películas que sus leyes inspiraron, se enfocaron los conflictos que surgen cuando los robots tienen problemas en decidir cómo obedecer las leyes en situaciones complejas del mundo real.
Estas leyes también se llevan el crédito por ayudar a crear el robot “adorable” en la ciencia ficción: un arquetipo popularizado en la televisión y las películas desde Perdidos en el espacio hasta Star Wars yCortocircuito.
HAL 9000
HAL 9000 fue, indiscutiblemente, la estrella de 2001: Odisea en el espacio, la épica e innovadora película de Stanley Kubrick de 1968.
Esta voz impasible e incorpórea, capaz de controlar mecánicamente la nave Discovery, representaba nuestros temores de lo que pasaría si la tecnología se saliera de control, en los albores de la Era Espacial. Un año después, el hombre caminó por primera vez en la Luna.
En lugar de obedecer las Leyes de Asimov, la misión de HAL, antes que nada, es asegurarse de que la misión de su nave sea un éxito. Y dicha orden tiene un resultado mortal y casi desastroso.
Algunos afirman que, debido a que no tenía una forma física, HAL realmente no es un robot. Pero la Universidad Carnegie Mellon decidió que merecía entrar al Salón de la Fama de los Robots con su clase inaugural, en 2003.
R2-D2 y C-3PO
Probablemente nadie impulsó más a los robots en la conciencia pública que estos dos, cuando llegaron a la pantalla en 1977.
Llenos de personalidad, galantes y siempre útiles, la pareja ha aparecido en las seis películas de Star Wars hasta la fecha.
El director, George Lucas, dijo que R2-D2 es su personaje favorito de las películas.
Terminator
Skynet es el sistema que dirige a los Terminator; los robots de la serie de películas (y posteriormente programas de televisión) que comenzó en 1984.
Los robots de Terminator son una nueva encarnación de nuestros peores miedos; máquinas asesinas que viajan en el tiempo. Y todo se debe a que las personas a cargo anteponen el "qué podemos hacer" al "qué debemos hacer".
Data
Data es como un "antiterminator”.
El androide de Star Trek: la nueva generación es una creación científica tan perfectamente cercana a un humano, que su mente hipermotorizada no puede evitar querer ser uno de nosotros.
Al final, un “chip de emoción” concedió el deseo de Data, como a una especie de Pinocho, de convertirse en alguien “de verdad”.
Robotina
Quién no quiere ahorrarse los quehaceres de la casa con un robot, aunque tenga un fuerte temperamento. Robotina, la ayudante de limpieza de Los supersónicos, se dedicaba a mantener limpia la casa y atender a la familia. Algo no muy distinto de lo que esperan algunos ingenieros de sus robots.
Wall-E
Wall-E salió en 2008.
Podría decirse que la película ganadora de un Premio de la Academia es la mejor de Pixar, y una gran razón para eso fue la “actuación” sin palabras pero conmovedora de Wall-E.
Como en la mayoría de los relatos de ciencia ficción, Wall-E aborda cuestiones sociales más grandes, como el consumismo desenfrenado y los desperdicios ambientales, todo ello con la inocente presencia de un robot que se conecta con millones de espectadores, jóvenes y viejos, a un nivel personal.

martes, 15 de septiembre de 2015
Tres leyes de la robótica
En ciencia ficción las tres leyes de la robótica son un conjunto de normas escritas por Isaac Asimov, que la mayoría de los robots de sus novelas y cuentos están diseñados para cumplir. En ese universo, las leyes son "formulaciones matemáticas impresas en los senderos positrónicos del cerebro" de los robots (líneas de código del programa que regula el cumplimiento de las leyes guardado en la memoria Flash EEPROM principal del mismo). Aparecidas por primera vez en el relato Runaround (1942), establecen lo siguiente:
- Un robot no hará daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la 1ª Ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la 1ª o la 2ª Ley.1
Esta redacción de las leyes es la forma convencional en la que los humanos de las historias las enuncian; su forma real sería la de una serie de instrucciones equivalentes y mucho más complejas en el cerebro del robot.
Asimov atribuye las tres Leyes a John W. Campbell, que las habría redactado durante una conversación sostenida el 23 de diciembre de 1940. Sin embargo, Campbell sostiene que Asimov ya las tenía pensadas, y que simplemente las expresaron entre los dos de una manera más formal.
Las tres leyes aparecen en un gran número de historias de Asimov, ya que aparecen en toda su serie de los robots, así como en varias historias relacionadas, y la serie de novelas protagonizadas por Lucky Starr. También han sido utilizadas por otros autores cuando han trabajado en el universo de ficción de Asimov, y son frecuentes las referencias a ellas en otras obras, tanto de ciencia ficción como de otros géneros.
Los primeros robots
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La independencia creada en sus movimientos hace que sus acciones sean la razón de un estudio razonable y profundo en el área de la ciencia y tecnología. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.1
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ese comportamiento imita al de los humanos o a otros animales. Actualmente podría considerarse que un robot es una computadora con la capacidad y el propósito de movimiento que en general es capaz de desarrollar múltiples tareas de manera flexible según su programación; así que podría diferenciarse de algún electrodoméstico específico.
Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de metal de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.


Historia de la robotica
La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.


Inteligencia artificial
La inteligencia artificial (IA) es un área multidisciplinaria, que a través de ciencias como las ciencias de la computación, lamatemática, la lógica y la filosofía, estudia la creación y diseño de sistemas capaces de resolver problemas cotidianos por sí mismas utilizando como paradigma la inteligencia humana.[cita requerida]
General y amplio como eso, reúne a amplios campos, los cuales tienen en común la creación de máquinas capaces de pensar. En ciencias de la computación se denomina inteligencia artificial a la capacidad de razonar de un agente no vivo.1 2 3John McCarthy acuñó la expresión «inteligencia artificial» en 1956, y la definió así: “Es la ciencia e ingenio de hacer máquinas inteligentes, especialmente programas de cómputo inteligentes”.4
- Búsqueda del estado requerido en el conjunto de los estados producidos por las acciones posibles.
- Algoritmos genéticos (análogo al proceso de evolución de las cadenas de ADN).
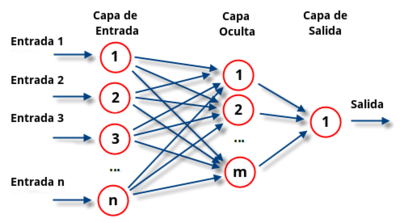
- Redes neuronales artificiales (análogo al funcionamiento físico del cerebro de animales y humanos).
- Razonamiento mediante una lógica formal análogo al pensamiento abstracto humano.

También existen distintos tipos de percepciones y acciones, que pueden ser obtenidas y producidas, respectivamente, por sensores físicos y sensores mecánicos en máquinas, pulsos eléctricos u ópticos en computadoras, tanto como por entradas y salidas de bits de un software y su entorno software.
Varios ejemplos se encuentran en el área de control de sistemas, planificación automática, la habilidad de responder a diagnósticos y a consultas de los consumidores, reconocimiento de escritura, reconocimiento del habla y reconocimiento de patrones. Los sistemas de IA actualmente son parte de la rutina en campos como economía, medicina, ingeniería y lamilicia, y se ha usado en gran variedad de aplicaciones de software, juegos de estrategia, como ajedrez de computador, y otros videojuegos.
Suscribirse a:
Entradas (Atom)